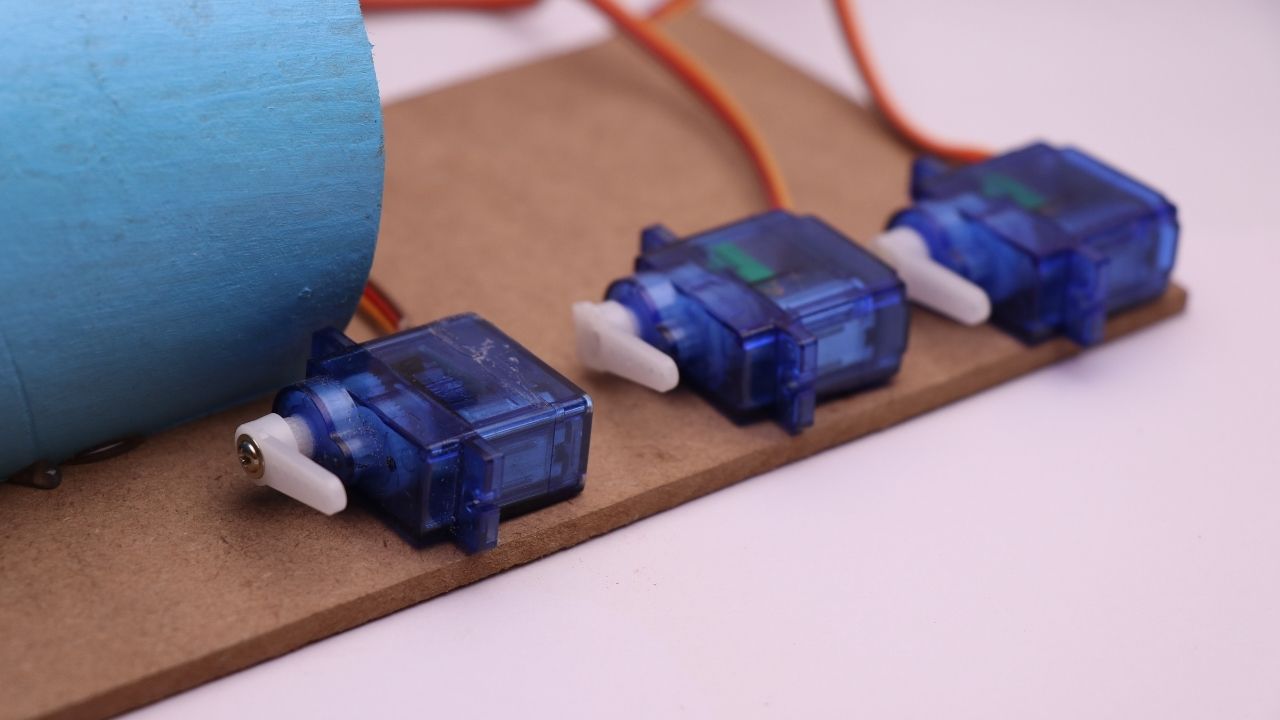
Yuk Fanbot kita belajar kontrol servo dengan Blynk IoT. Motor servo adalah sebuah motor DC yang di lengkapi rangkaian kendali dengan sistem closed feedback yang terintegrasi dalam motor tersebut. Pada motor servo posisi putaran sumbu (axis) dari motor akan di informasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Apabila motor servo ini di hubungkan dengan perangkat IoT, maka pergerakan motor servo dapat di atur dari mana saja.
[lwptoc numeration=”none” title=”Daftar Isi”]
Kontrol Servo IoT BLYNK
1. Skema Rangkaian

Gambar rangkaian Kontrol Servo
2. Alat / Bahan
- Pertama, NodeMCU ESP8266 : 1 buah
- Kedua, Servo 5V : 1 buah
- Ketiga, Jumper kabel : secukupnya
Baca Juga : Tutorial ESP32-CAM : Streaming Online dengan Ngrok dan Blynk
3. Sketch Program
/*
Program Kontrol Servo dengan Blynk
dibuat oleh Indobot
*/
#define BLYNK_PRINT Serial //Pendeklarasian Library
#include <ESP8266WiFi.h>
#include <BlynkSimpleEsp8266.h>
#include <Servo.h>
char auth[] = "XXXX"; // masukkan kode autentikasi disini
char ssid[] = "Indobot"; //nama wifi
char pass[] = "123456789"; //password
Servo servo; //Deklarasi Kontrol Servo
BLYNK_WRITE(V3){
servo.write(param.asInt());
}
void setup(){ //Pengaturan Pin dan Variabel
Serial.begin(9600);
Blynk.begin(auth, ssid, pass);
servo.attach(9);
}
void loop(){ //Perulangan Program
Blynk.run();
}
Baca Juga : Mengendalikan Motor Stepper dengan Arduino Uno
Pengaturan BLYNK
- Gunakan Widget Box tipe Slider

Gambar pemilihan Widget Box Slider
- Pada Slider Settings, pilih pin Virtual V3, lalu atur nilai maksimal sebesar 90

Gambar pengaturan Slider
Interface :

Gambar interface Kontrol Servo BLYNK
Kesimpulan :
Dalam proyek ini, NodeMCU memainkan peran kunci dengan terhubung secara nirkabel ke aplikasi Blynk. NodeMCU, sebuah modul mikrokontroler berbasis ESP8266, menyediakan koneksi WiFi yang memungkinkan komunikasi mudah dengan aplikasi Blynk. Kemudian fokus utama proyek ini adalah mengontrol pergerakan motor servo, sebuah perangkat yang dapat diposisikan pada sudut tertentu.
Aplikasi Blynk memberikan antarmuka yang ramah pengguna melalui perangkat seluler, dan di dalamnya terdapat kontrol slider yang memungkinkan pengguna untuk menentukan sudut putaran motor servo. Konsepnya sangat menarik, karena dengan menggunakan slider ini, pengguna dapat secara interaktif mengatur posisi motor servo sesuai keinginan mereka. Ini menciptakan pengalaman pengguna yang dinamis dan memberikan fleksibilitas dalam mengendalikan perangkat fisik melalui aplikasi seluler.




Kak, izin beryanya sebelumnya, saya sudah mengikuti tutorial diatas dan pengupload programnya berhasil, tetapi pada app blynk nya tidak terhubung, solusinya gimana kak?
Oh begitu ya kak. Coba kita diskusinya pindah ke forum saja kak. Supaya lebih gampang link https://indobot.co.id/premium/forums/