| [lwptoc numeration=”none” title=”Daftar Isi”] |
Motor Listrik DC atau DC Motor adalah suatu perangkat yang mengubah energi listrik menjadi energi kinetik atau gerakan (motion). Motol listrik DC atau DC Motor ini menghasilkan sejumlah putaran per menit atau biasanya di kenal dengan istilah RPM (Revolutions per minute) dan dapat di buat berputar searah jarum jam maupun berlawanan arah jarum jam, kecepatan putaran motor listrik DC juga dapat di buat rendah maupun tinggi. Motor DC dapat dikendalikan dengan cara mengatur RPM-nya, untuk dapat mengatur RPM kita perlu menggunakan driver motor.
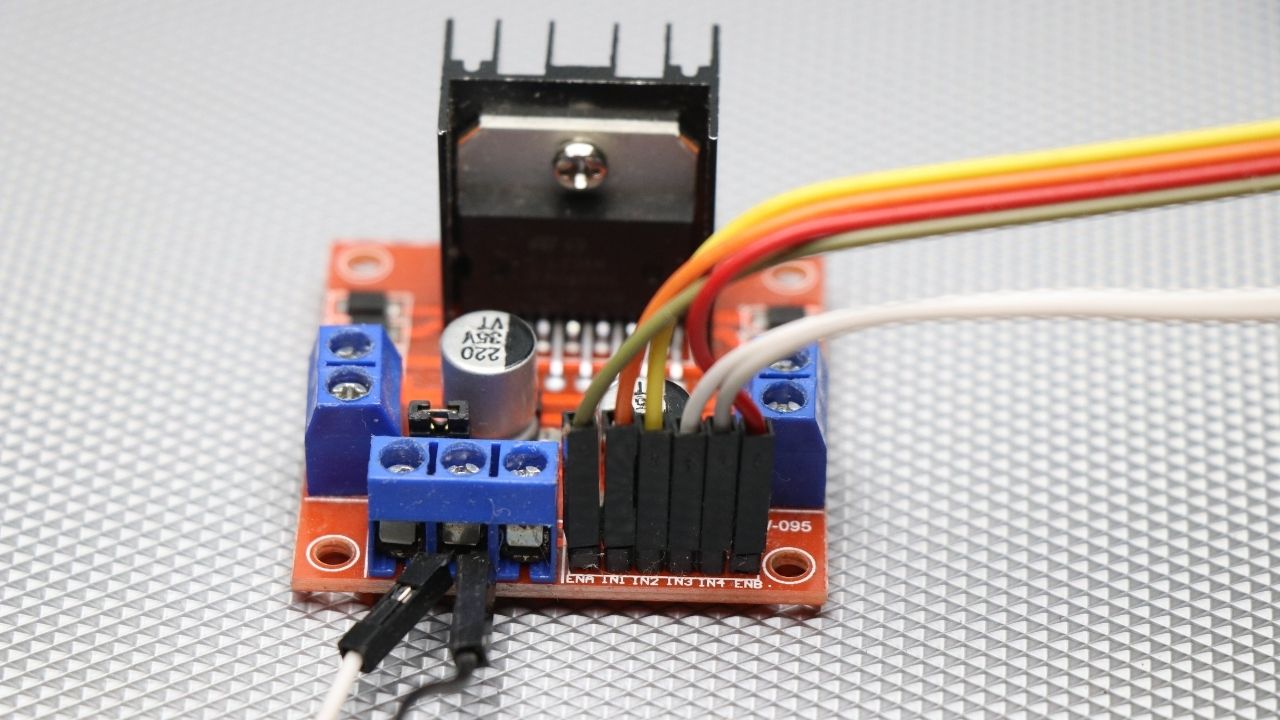
Dasar Kendali Motor DC Menggunakan Driver Motor L298N
1. Alat / Bahan
- Arduino IDE Download
- Arduino UNO 1 Buah
- Driver Motor L296N 1 Buah
- Motor DC 1 Buah
- Adapter 12VDC 1 Buah
- Project Board 1 Buah
- Kabel Jumper Secukupnya
2. Skema Rangkaian

Gambar Rangkaian Dasar Kendali Motor DC Menggunakan Driver Motor L298N
Keterangan:
- GND – GND Driver– GND Adapter
- D5 – IN1
- D6 – IN2
- 12V Driver – VCC adapter
- OUT 1 Diver – GND motor DC
- OUT 2 Driver – VCC motor DC
Baca Juga : Pengatur Suhu Ruangan Dengan DHT11 + Motor DC
3. Langkah Kerja
- Pertama Siapkan alat dan bahan
- Kedua Lakukan proses wiring dengan menggunakan Gambar skematik rangkaian
- Ketiga Buka software Arduino IDE yang telah terinstal pada laptop/komputer
- Lalu Ketikkan sketch program pada halaman Arduino IDE
- Terakhir Lakukan proses uploading program
4. Sketch Program
/* Program Dasar Kendali Motor DC Menggunakan Driver Motor L298N di buat oleh Indobot */
#define motor_maju 5 //IN 1 L298N pada pin D5
#define motor_mundur 6 //IN 2 L298N pada pin D6
int kecepatan = 0; //Variabel penampung nilai kecepatan
void setup() {
pinMode(motor_maju, OUTPUT); //Setting I/O
pinMode(motor_mundur, OUTPUT);
}
void loop() {
//----------Motor bergerak maju----------//
digitalWrite(motor_mundur, LOW);
for (kecepatan = 0; kecepatan <= 255; kecepatan += 10) {
analogWrite(motor_maju, kecepatan);
delay(200);
}
for (kecepatan = 255; kecepatan >= 0; kecepatan -= 10) {
analogWrite(motor_maju, kecepatan);
delay(200);
}
//----------Motor bergerak mundur----------//
digitalWrite(motor_maju, LOW);
for (kecepatan = 0; kecepatan <= 255; kecepatan += 10) {
analogWrite(motor_mundur, kecepatan);
delay(200);
}
for (kecepatan = 255; kecepatan >= 0; kecepatan -= 10) {
analogWrite(motor_mundur, kecepatan);
delay(200);
}
}
Kesimpulan:
Program bekerja sesuai dengan instruksi RPM yang diberikan, berdasarkan program motor DC akan berputar searah jarum jam kemudian berlawanan arah jarum jam.
Mau belajar elektronika dasar? Arduino? atau Internet of Things? Ikuti kursus online Indobot Academy!
Jangan lupa tetap upgrade skill kamu di Indobot Academy. Kamu bisa mendapatkan berbagai tutorial project. Selanjutnya tutorial bisa kamu terapkan di dalam kehidupan sehari-hari. Tak hanya itu, Indobot sudah menyediakan semua source coding yang dibutuhkan. Sehingga kamu hanya cukup membuka satu website saja. Oleh karena itu penting untuk mempelajari hal itu.




Sangat ditunggu untuk problem solved saya nih wkwkwk