Halo sahabat indobot.
Salah satu hal yang dapat meningkatkan pengetahuan kita adalah berlatih dan berlatih. Kalau teman-teman ingin menjadi ahli di bidang elektronika, arduino ataupun IoT, terus berlatih dengan menyelesaikan beberapa project merupakan salah satu solusinya. Jadi ada project Arduino apa hari ini?
Sudah pernah pake sensor apa aja nih yang teman-teman gunakan untuk project arduino?
Sensor pada rangkaian elektronika memiliki fungsi sebagai penambah informasi terkait keadaan fisik dari suatu lokasi. Keadaan fisik ini dapat berupa jarak, suhu, tekanan, suara, ataupun yang lainnya. Dalam robotika, semakin banyak pengetahuan robot atas lokasinya, semakin hebat pula robot itu. Kenapa? Karena semakin banyak informasi yang robot terima, maka semakin cerdas dalam menyingkapi apa yang terjadi di sekitar kita. Sehingga belajar membaca sensor adalah salah satu hal utama yang harus kita pelajari.
Konsultasikan project mu bersama Tutor Indobot Academy dengan cara registrasi melalui tombol di bawah!
Nah dalam kesempatan kali ini, kita akan mengembangkan kemampuan sensor ultrasonik menjadi “mata”. Mata di sini bukan diartikan sebagai bentuk penglihatan visual ya teman-teman. Mata yang dimaksudkan adalah kemampuan membaca kondisi lingkungan. Kemampuan ini disebut dengan ekolokasi. Ekolokasi adalah kemampuan dalam menentukan lokasi di mana dia berada dengan menggunakan pancaran gelombang ultrasonik/sonar. Kemampuan ini dimiliki oleh hewan-hewan yang dapat memancarkan gelombang ultrasonik seperti kalelawar. Jadi saat ini, kita akan membuat robot dengan insting kalelawar.
Baca juga: Belajar Sensor Ultrasonik lewat Kalelawar
Dalam project kali ini, kita akan membuat robot avoider yang secara otomatis akan menghindari adanya benturan dan mencari jalan lainnya. Langsung saja kita praktikkan.
Alat dan juga Bahan
- Komputer yang terinstall Arduino IDE
- Library: HCSR04
- Arduino UNO 1
- Sensor ultrasonik HCSR-04 1
- Projectboard 1
- Motor DC beroda 2
- Motor Driver 1
- W420 Steel Ball Fly Wheel 1
- Kabel jumper 1
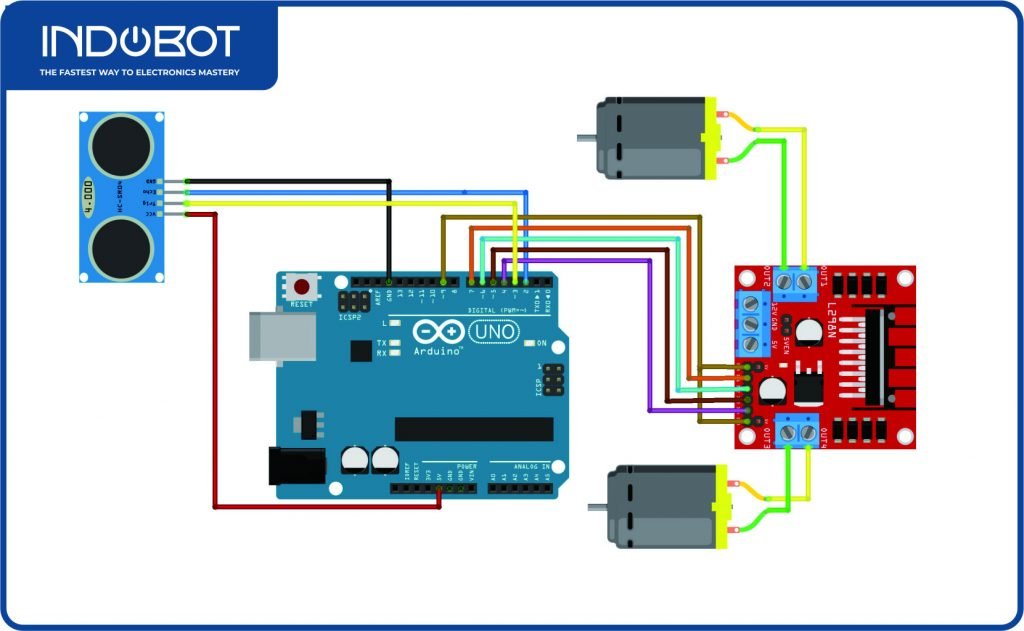
Gambar Rangkaian
Tahap selanjutnya adalah membuat rangkaian seperti berikut:
Jika sudah selesai, kita lanjut ke tahap selanjutnya, yaitu program. Hubungkan arduino UNO dengan PC/laptop. Kemudian masukkan program seperti di bawah ini:
const int motor1_1 = 7;
const int motor1_2 = 6;
const int motor2_1 = 5;
const int motor2_2 = 4;
//1 motor 2 inisialisasi digunakan untuk putar kanan dan kiri
const int pinTrig = 3; // pin Trigger untuk Ultrasonik
const int pinEcho = 2; // pin Echo untuk Ultrasonik
int durasi, jarak;
const int pinSpeed = 9; //pengatur kecepatan
int Speed;
void setup()
{
pinMode(motor1_1, OUTPUT);
pinMode(motor1_2, OUTPUT);
pinMode(motor2_1, OUTPUT);
pinMode(motor2_2, OUTPUT);
pinMode(pinTrig, OUTPUT);
pinMode(pinEcho, INPUT);
pinMode(pinSpeed, OUTPUT);
}
void loop()
{
Speed = constrain(Speed, 0, 255);
Speed = 255;
analogWrite(pinSpeed, Speed);
//program membaca sensor ultrasonik
digitalWrite(pinTrig, HIGH);
delayMicroseconds(10);
digitalWrite(pinTrig, LOW);
durasi = pulseIn(pinEcho, HIGH);
jarak = ((durasi * 0.034) / 2);
//jika jarak melebihi 10cm maju terus
if (jarak >= 10)
{
digitalWrite(motor1_1, HIGH);
digitalWrite(motor1_2, LOW);
digitalWrite(motor2_1, HIGH);
digitalWrite(motor2_2, LOW);
}
// jika jarak kurang dari 10 mundur 300ms lalu belok kiri
else if (jarak < 10)
{
digitalWrite(motor1_1, LOW);
digitalWrite(motor1_2, HIGH);
digitalWrite(motor2_1, LOW);
digitalWrite(motor2_2, HIGH);
delay(300);
digitalWrite(motor1_1, HIGH);
digitalWrite(motor1_2, LOW);
digitalWrite(motor2_1, LOW);
digitalWrite(motor2_2, HIGH);
delay(300);
}
}
|
Baca juga: Cara mudah membaca Ultrasonik tanpa library
Selanjutnya silakan teman-teman bisa susun semua rangkaian menjadi seperti mobil beroda 3 dengan W420 Steel Ball Fly Wheel berada di depan dan 2 servo di belakang, beserta sensor ultrasonik yang menghadap ke depan.
Nah. Gampangkan. Teman-teman bisa dicoba nih. Kalau sudah bisa, coba ditambahkan dengan sensor ultrasonik yang menghadap kanan dan kiri untuk mengetahui keadaan di sampingnya dan bisa langsung menentukan gerakan selanjutnya. Selain itu, teman-teman juga bisa menambahkan display seperti LCD 16×2 yang dapat menampilkan jarak robot dengan benda di depannya.
Silakan mencoba.

Bikin project tanpa ribet beli komponen sana-sini? Starter Kit Arduino/IoT bisa jadi solusi mu!




Warning: Undefined variable $req in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 162
Warning: Undefined variable $commenter in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 163
Warning: Trying to access array offset on value of type null in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 163
Warning: Undefined variable $aria_req in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 163
Warning: Undefined variable $req in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 167
Warning: Undefined variable $commenter in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 168
Warning: Trying to access array offset on value of type null in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 168
Warning: Undefined variable $aria_req in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 169