Hello sahabat Indobot Academy, Kali ini kita akan membahas tutorial arduino lagi, yaitu Cara Mengakses Sensor Gyro MPU6050 GY-521
pada kesempatan kali ini saya akan membagikan tulisan tentang Arduino, Cara Mengakses Sensor Gyro MPU6050 GY-521.
di mana sensor ini di gunakan untuk membaca perubahan posisi atau juga di sebut membaca kemiringan sudut berdasarkan Sensor accelerometer dan Sensor Gyroscope.
pada tutorial ini saya ingin memainkan beberapa LED ketika di miringkan akan menyala sesuai posisinya. untuk lebih jelasnya silahkan nanti lihat video di bawah.
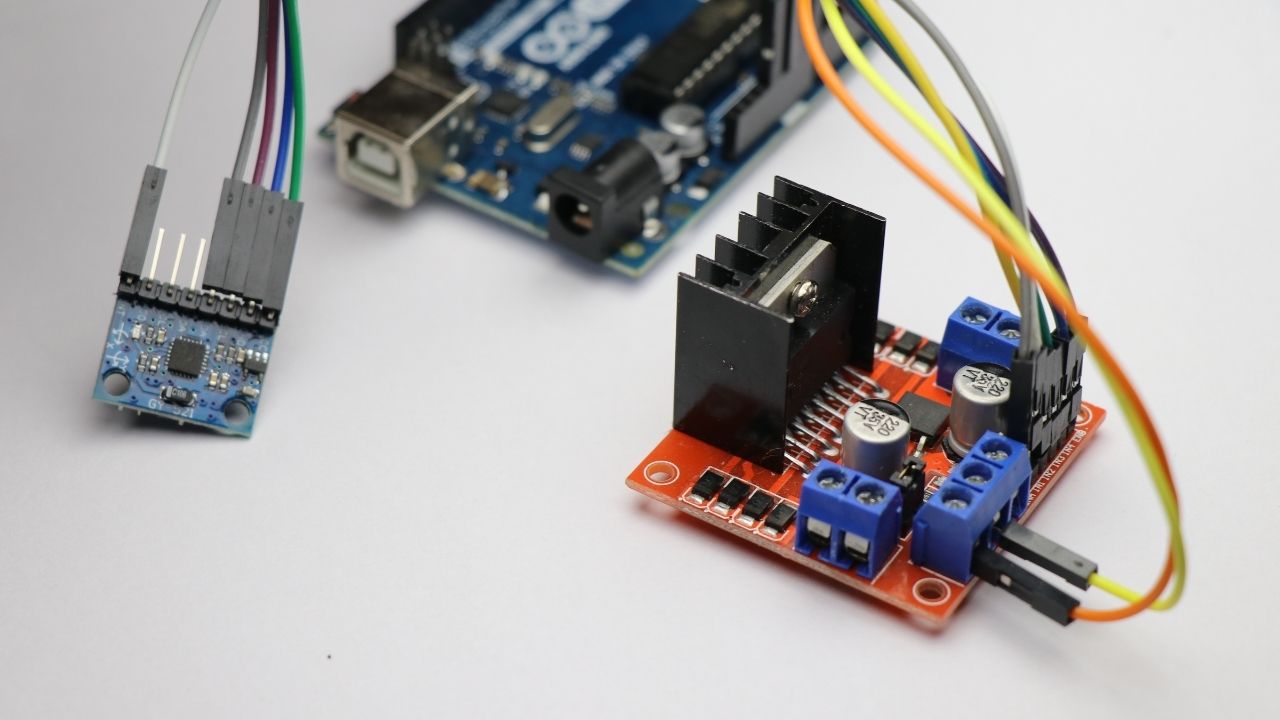
langsung saja untuk tutorialnya pertama seperti biasa kita harus menyiapkan komponenya.
Arduino Nano / Arduino Uno / Arduino Mega2560 / Arduino Pro mini dan yang lainya
Sensor MPU6050 GY521
Led Super Bright
Baca Juga : Arduino, Simulasi Mengakses LCD 16×2 Proteus
#include
const int MPU_addr=0x68; // I2C address of the MPU-6050
int16_t AcX,AcY,AcZ,Tmp,GyX,GyY,GyZ;
byte led [] = {3,4,5,7,8,9,10};
void setup(){
Wire.begin();
Wire.beginTransmission(MPU_addr);
Wire.write(0x6B); // PWR_MGMT_1 register
Wire.write(0); // set to zero (wakes up the MPU-6050)
Wire.endTransmission(true);
Serial.begin(9600);
pinMode (10, OUTPUT);
pinMode (9, OUTPUT);
pinMode (8, OUTPUT);
pinMode (7, OUTPUT);
pinMode (5, OUTPUT);
pinMode (4, OUTPUT);
pinMode (3, OUTPUT);
}
void loop(){
Wire.beginTransmission(MPU_addr);
Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU_addr,14,true); // request a total of 14 registers
AcX=Wire.read()<<8|Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
AcY=Wire.read()<<8|Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
AcZ=Wire.read()<<8|Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
Tmp=Wire.read()<<8|Wire.read(); // 0x41 (TEMP_OUT_H) & 0x42 (TEMP_OUT_L)
GyX=Wire.read()<<8|Wire.read(); // 0x43 (GYRO_XOUT_H) & 0x44 (GYRO_XOUT_L)
GyY=Wire.read()<<8|Wire.read(); // 0x45 (GYRO_YOUT_H) & 0x46 (GYRO_YOUT_L)
GyZ=Wire.read()<<8|Wire.read(); // 0x47 (GYRO_ZOUT_H) & 0x48 (GYRO_ZOUT_L)
Serial.print(“AcX = “); Serial.print(AcX);
Serial.print(” | AcY = “); Serial.print(AcY);
Serial.print(” | AcZ = “); Serial.print(AcZ);
Serial.print(” | Tmp = “); Serial.println(Tmp/340.00+36.53); //equation for temperature in degrees C from datasheet
// Serial.print(” | GyX = “); Serial.print(GyX);
// Serial.print(” | GyY = “); Serial.print(GyY);
// Serial.print(” | GyZ = “); Serial.println(GyZ);
if (AcY < 4056 && AcY > 3356){
digitalWrite(led[0], 0);
digitalWrite(led[1], 0);
digitalWrite(led[2], 0);
digitalWrite(led[3], 0);
digitalWrite(led[4], 0);
digitalWrite(led[5], 0);
digitalWrite(led[6], 1);
}
else if (AcY < 3006 && AcY > 2356){
digitalWrite(led[0], 0);
digitalWrite(led[1], 0);
digitalWrite(led[2], 0);
digitalWrite(led[3], 0);
digitalWrite(led[4], 0);
digitalWrite(led[5], 1);
digitalWrite(led[6], 0);
}
else if (AcY < 1756 && AcY > 356){
digitalWrite(led[0], 0);
digitalWrite(led[1], 0);
digitalWrite(led[2], 0);
digitalWrite(led[3], 0);
digitalWrite(led[4], 1);
digitalWrite(led[5], 0);
digitalWrite(led[6], 0);
}
else if (AcY < 356 && AcY > -1062){
digitalWrite(led[0], 0);
digitalWrite(led[1], 0);
digitalWrite(led[2], 0);
digitalWrite(led[3], 1);
digitalWrite(led[4], 0);
digitalWrite(led[5], 0);
digitalWrite(led[6], 0);
}
else if (AcY < -1062 && AcY > -1268){
digitalWrite(led[0], 0);
digitalWrite(led[1], 0);
digitalWrite(led[2], 0);
digitalWrite(led[3], 1);
digitalWrite(led[4], 0);
digitalWrite(led[5], 0);
digitalWrite(led[6], 0);
}
else if (AcY < -1268 && AcY > -2824){
digitalWrite(led[0], 0);
digitalWrite(led[1], 0);
digitalWrite(led[2], 1);
digitalWrite(led[3], 0);
digitalWrite(led[4], 0);
digitalWrite(led[5], 0);
digitalWrite(led[6], 0);
}
else if (AcY < -2824 && AcY > -3824){
digitalWrite(led[0], 0);
digitalWrite(led[1], 1);
digitalWrite(led[2], 0);
digitalWrite(led[3], 0);
digitalWrite(led[4], 0);
digitalWrite(led[5], 0);
digitalWrite(led[6], 0);
}
else if (AcY < -3824 && AcY > -4824){
digitalWrite(led[0], 1);
digitalWrite(led[1], 0);
digitalWrite(led[2], 0);
digitalWrite(led[3], 0);
digitalWrite(led[4], 0);
digitalWrite(led[5], 0);
digitalWrite(led[6], 0);
}delay(2);
}
mungkin cukup itu dulu yang bisa saya tuliskan kali ini, kurang lebihnya mohon maaf, silahkan beri komentar masukan dan kritikanya di bawah.
untuk melihat hasil videonya silahkan tonton video di bawah ini.
Source : https://www.anakkendali.com/2018/08/arduino-cara-mengakses-sensor-gyro.html




Warning: Undefined variable $req in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 162
Warning: Undefined variable $commenter in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 163
Warning: Trying to access array offset on value of type null in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 163
Warning: Undefined variable $aria_req in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 163
Warning: Undefined variable $req in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 167
Warning: Undefined variable $commenter in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 168
Warning: Trying to access array offset on value of type null in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 168
Warning: Undefined variable $aria_req in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 169