Halo Fanbot!
Masih Sering nonton TV?
TV sekarang jenisnya sudah banyak nih, begitu juga dengan penangkap sinyalnya, ada yan menggunakan parabola, ada yang masih menggunakan antena.
Antena terkadang harus menghadap ke arah yang sesuai untuk menghasilkan gambar yang jernih. Antena merupakan alat yang dapat mengubah sinyal/energi listrik menjadi gelombang elektromagnetik. Gelombang tersebut dapat dipancarkan ke ruang bebas atau sebaliknya, gelombang elektromagnetik dari ruang bebas kemudian diterima oleh antena menjadi sinyal. Tidak hanya di TV saja, antena juga banyak digunakan untuk transfer data, seperti radio, radar, hingga satelit. Antena pada TV berguna untuk menangkap gelombang atau sinyal dari satelit TV yang terkumpulkan menjadi satu titik fokus.
Namun ketika kita menggunakan antena ini, terkadang menemukan beberapa siaran TV yang kurang buram. Sebab utamanya dikarenakan kita salah memposisikan antena kita untuk menghadap ke sumber gelombang. Sehingga kita harus menyesuaikan kembali posisinya hingga kita mendapat tayangan yang jernih.
baca juga: Tutorial Membuat Kendali Warna LED RGB dengan Menggunakan Slider Blynk
Pada project kali ini, kita akan membuat alat untuk mengatur posisi hadap dari antena dengan menggunakan aplikasi Blynk. Pada antena akan dipasang motor stepper yang berfungsi untuk memutar antena 360 derajat. Kemudian motor stepper ini akan dihubungkan dengan nodeMCU ESP8266 sebagai device mikrokontroler yang dapat mengendalikan motor stepper dan menerima perintah dari aplikasi blynk yang ada di smartphone. Bagaimana cara membuatnya? yuk kita simak.
Tutorial Membuat IoT untuk Mengatur Posisi Hadap Antena TV dengan Blynk

Alat dan Bahan
Alat dan bahan untuk project ini adalah sebagai berikut.
- Software Arduino IDE
- NodeMCU ESP8266 1
- Motor Stepper 1
- Project Board 1
- Kabel jumper Secukupnya
baca juga: Monitoring Suhu dan Kelembapan BLYNK NodeMCU ESP8266
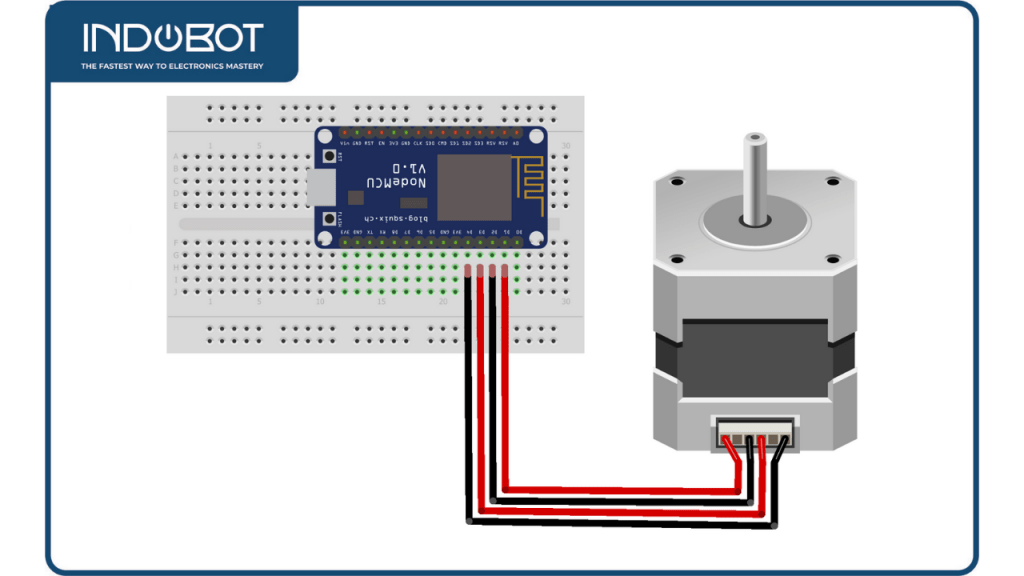
Rangkaian
Susun device di atas menjadi rangkaian seperti berikut. Pastikan semua terhubung dengan baik.
Belajar Elektronika, Arduino, dan IoT step by step dengan bantuan tangga belajar? Daftar sekarang dan dapatkan PROMO

Pengaturan Blynk
Sebelum kita masuk ke program Arduino IDE, kita harus menyesuaikan aplikasi Blynk terlebih dahulu. ikuti langkah berikut ini.
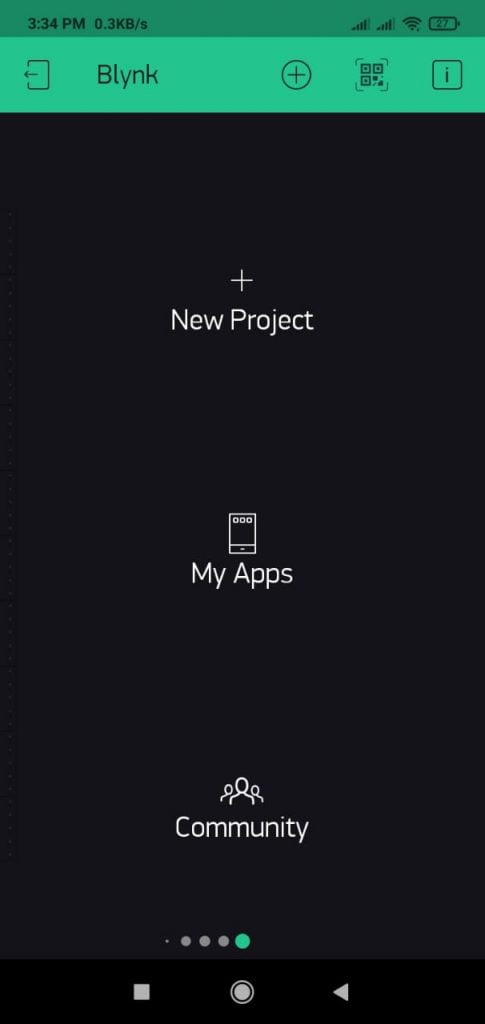
buka aplikasi Blynk, kemudian pilih New Project.
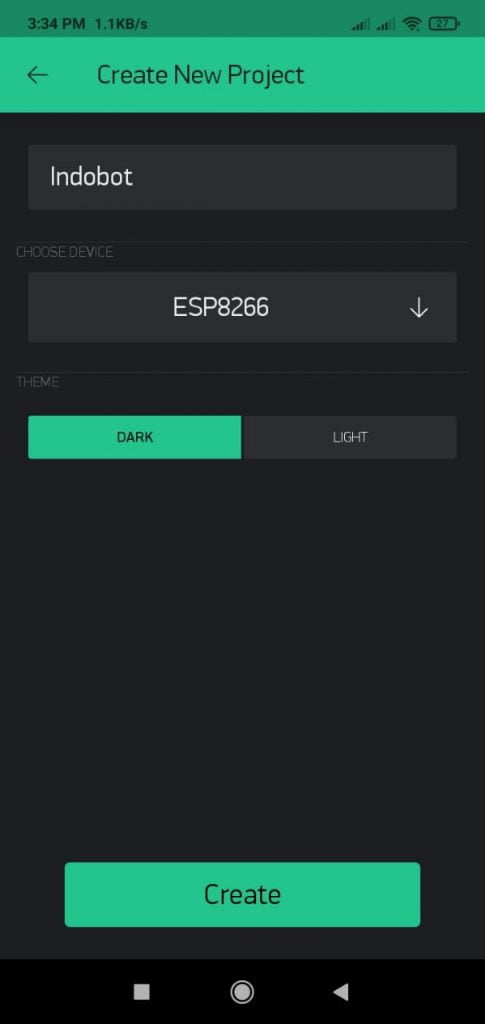
Berikan nama untuk aplikasi anda di Project name, setelah itu pilih device yang akan kita gunakan (NodeMCU ESP8266). Pilih mode tampilan untuk aplikasi Blynk kita. Dark untuk mode gelap. Light untuk mode terang. klik Create.
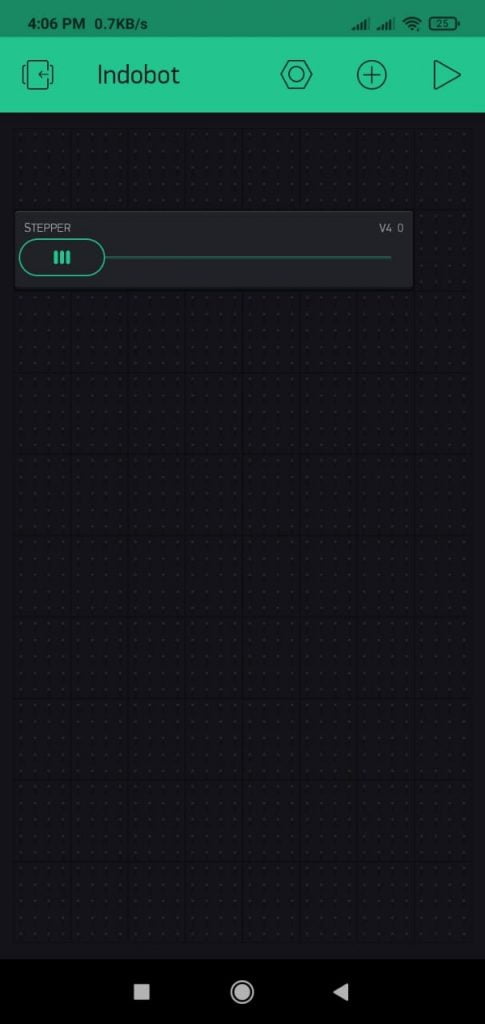
Jika Sudah maka akan muncul tampilan seperti di bawah ini. Klik tanda plus untuk menambahkan Widget Box.
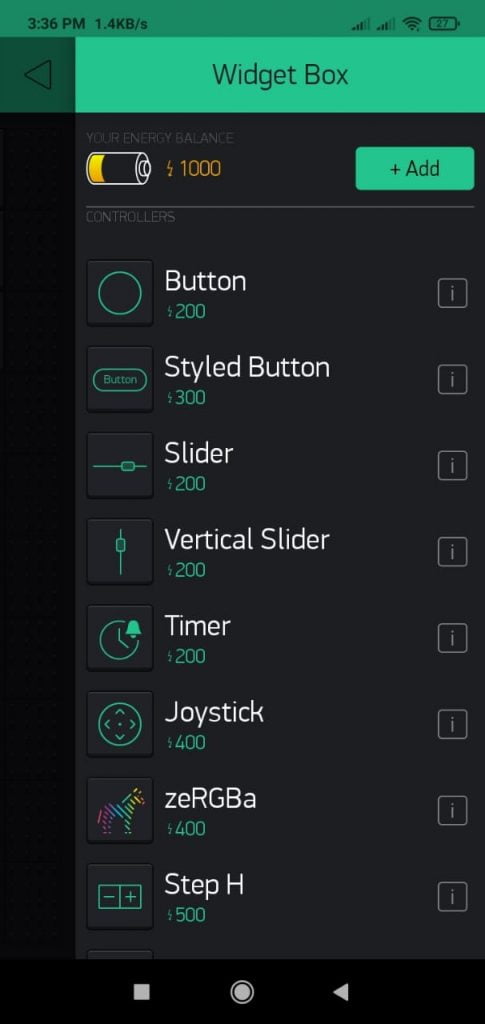
Pilih Slider untuk mengatur putaran pada motor stepper.
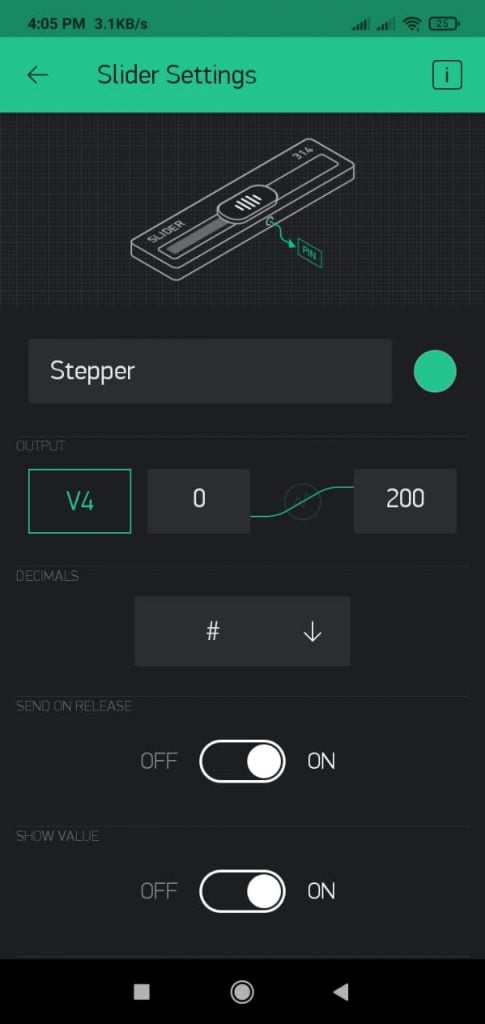
Atur tiap-tiap Slider dengan klik di masing-masing widget. Setelah muncul tampilan seperti berikut ini, tuliskan namanya. Ubah output menjadi V4. dengan range antara 0 sampai 200 (batas maksimal nilai untuk step dari motor stepper). Pada Send on release dan show value, pilih on. Kemudian jika sudah, klik tanda panah di kiri atas.
Pilih tanda segitiga di kanan atas untuk menjalankan aplikasi.
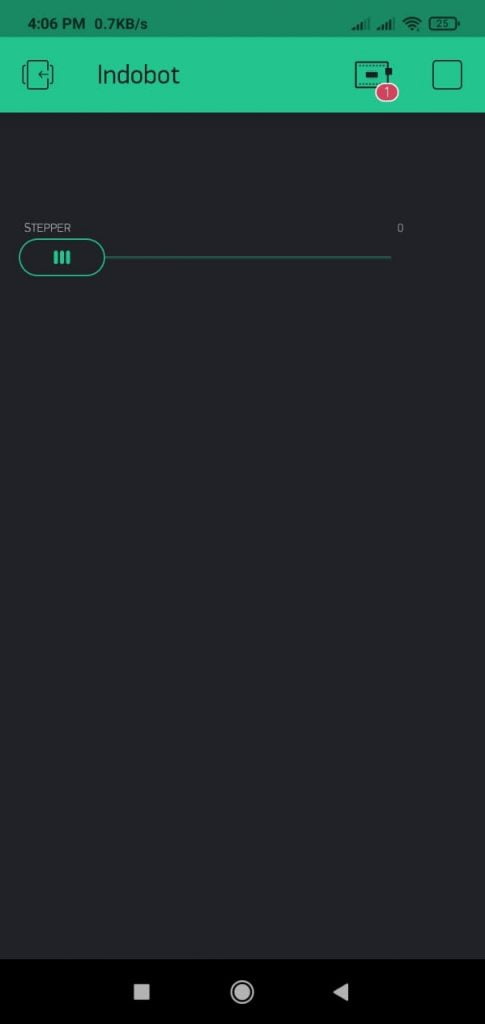
Tunggu hingga NodeMCU sudah diupload program agar dapat terhubung dengan Blynk.
Program
Tahap selanjutnya adalah penulisan program pada Arduino IDE. Buatlah program seperti berikut. Pastikan sudah memasukkan library blynk dan stepper agar program tidak mengalami error.
//Memutar motor stepper dengan pelan (step by step)
#define BLYNK_PRINT Serial //Pendeklarasian Library
#include <ESP8266WiFi.h>;
#include <BlynkSimpleEsp8266.h>;
#include <Stepper.h>
char auth[] = "************"; // masukkan kode autentikasi disini
char ssid[] = "************"; //nama wifi
char pass[] = "************"; //password
const int stepsPerRevolution = 200; // nilai banyaknya step per putaran
// menginisialisasi stepper menggunakan pin D1, D2, D3, dan D4 secara berurutan
Stepper myStepper(stepsPerRevolution, D1, D2, D3, D4);
int nilai;
BLYNK_WRITE(V4){
nilai = param.asInt(); //menerima nilai dari blynk
myStepper.step(nilai); //menjalankan motor stepper sesuai nilai dari blynk
}
void setup() {
// inisialisasi serial 9600
Serial.begin(9600);
Blynk.begin(auth, ssid, pass);
myStepper.setSpeed(30);
}
void loop() {
Blynk.run();
}
|
Jangan lupa masukkan kode autentikasi yang sudah dikirimkan oleh blynk ke program arduino IDE. Copy saja dari email anda ke tanda bintang di char auth[] = “**********”;. Selain itu, masukkan juga nama wifi dan password yang anda gunakan.
Upload program di atas ke NodeMCU ESP8266 yang anda gunakan. Kemudian cek ke blynk, apakah sudah terhubung dengan NodeMCU anda atau belum.
Hasil dari project ini adalah kita dapat mengatur ke mana antena akan menghadap hanya dengan menggunakan smartphone. Sehingga kita juga dapat mengubahnya dengan tetap dapat memastikan hasil dari pengubahan posisi antena tersebut.
Dalam program di atas, pembacaan nilai dari aplikasi blynk adalah di bagian berikut.
BLYNK_WRITE(V4){
nilai = param.asInt();
myStepper.step(nilai); }
Program di atas untuk mengetahui nilai akan dikirimkan dari blynk di V4. Nilai ini kemudian dieksekusi dengan menggunakan program myStepper.step(nilai); untuk menjalankan stepper sesuai step. Step untuk motor stepper yang saya gunakan adalah 200 step untuksatu putaran. sehingga pada slider blynk, diberikan maksimal nilai pada 200 saja. (Silakan dapat disesuaikan dengan kebutuhan)
Bagaimana? tertarik untuk mencobanya? atau memang lagi dibutuhin nih project ini. Hehe. Langsung eksekusi aja ya kakak.
 Mau belajar elektronika dasar? Arduino? atau Internet of Things? Ikuti kursus online Indobot Academy!
Mau belajar elektronika dasar? Arduino? atau Internet of Things? Ikuti kursus online Indobot Academy!




Warning: Undefined variable $req in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 162
Warning: Undefined variable $commenter in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 163
Warning: Trying to access array offset on value of type null in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 163
Warning: Undefined variable $aria_req in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 163
Warning: Undefined variable $req in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 167
Warning: Undefined variable $commenter in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 168
Warning: Trying to access array offset on value of type null in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 168
Warning: Undefined variable $aria_req in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 169