Tutorial Arduino – Hallo Sahabat Indobot… kali ini kita masih membahas tentang pengendalian motor servo. Pastinya tutorial kali ini sangat menarik karena kita akan mengendalikan 2 sekaligus servo menggunakan Modul Joystick. jika membahas Joystik Pasti sahabat indobot familiarnya hanya tentang game kan? Kali ini kita akan coba mengaplikasikannya pada pembelajaran Arduino. Yuk langsung saja simak tutorialnya di bawah ini:
1.Alat dan Bahan
Pertama Sahabat Indobot Siapkan alat dan Bahannya :
Komputer yang terinstal Arduino IDE 1 unit
Motor Servo 2 buah
Joystik Biaxial 1 buah
Kabel Penghubung Secukupnya
2.Gambar Rangkaian
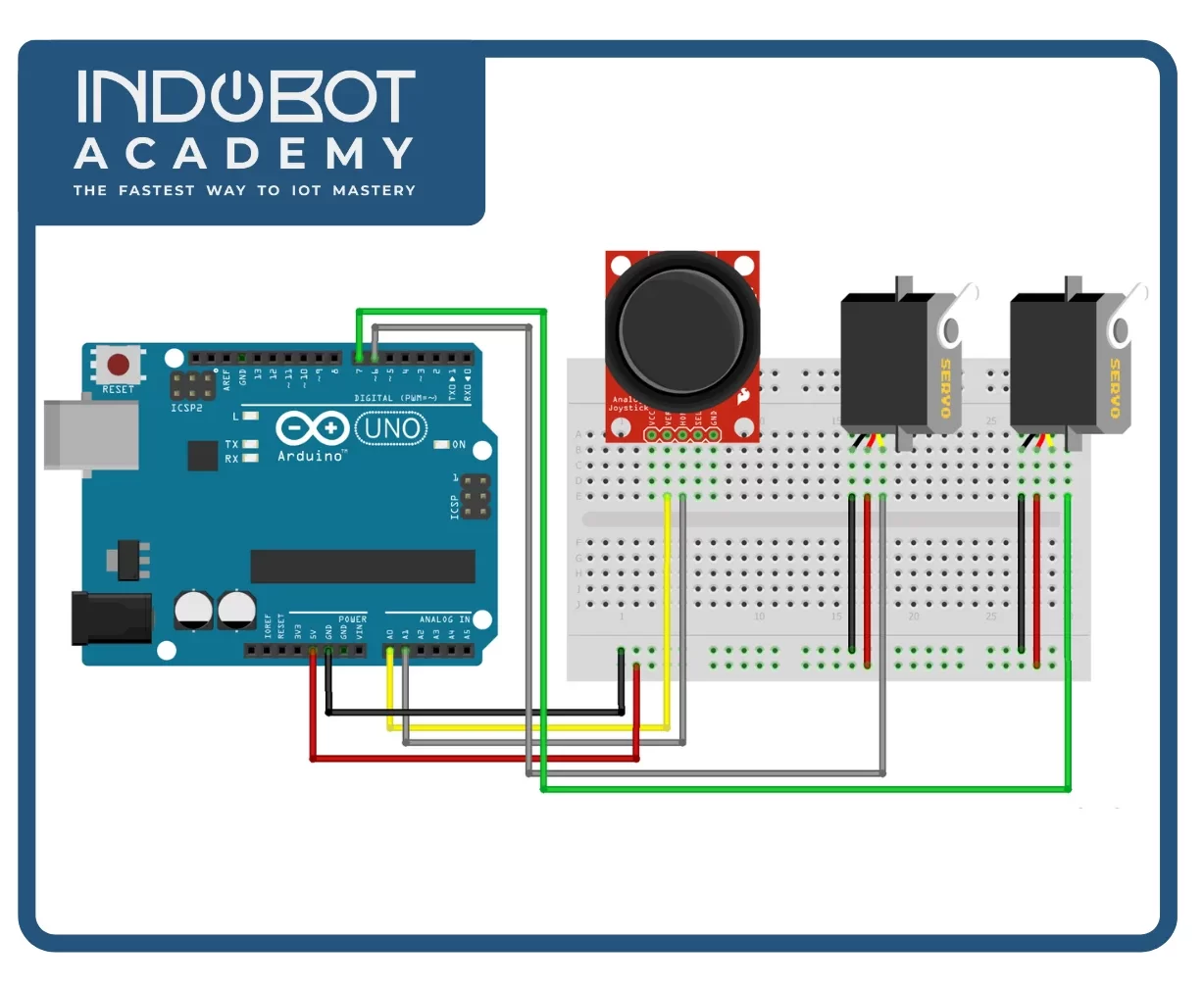
Tahap kedua, silahkan Sahabat Indobot buat rangkain seperti gambar di bawah ini :
Gambar Rangkaian Menggunakan Dua Motor Servo dan JoyStick
3.programming
Dapatkan akses ratusan video tutorial dan pembelajaran dengan registrasi melalui tombol di bawah!
Tahap Terakhir, Sahabat indobot silahkan ketikkan Program di bawah ini pada Arduino IDE masing-masing :
#include <servo.h>
Servo servo_X;
Servo servo_Y;
int X_angleValue = 0;
int Y_angleValue = 0;
int X_axis = A0;
int Y_axis = A1;
int Z_axis = 2;
int x = 0;
int y = 0;
int z = 0;
int pos = 0;
int check1 = 0;
int check2 = 0;
int threshold = 10;
void setup()
{
Serial.begin(9600);
servo_X.attach(7);
servo_Y.attach(6);
pinMode(X_axis, INPUT);
pinMode(Y_axis, INPUT);
pinMode(Z_axis, INPUT);
digitalWrite(Z_axis, HIGH);
}
void loop()
{
x = analogRead(X_axis);
y = analogRead(Y_axis);
z = digitalRead(Z_axis);
if(z == LOW)
{
Serial.print("Z axis status = ");
Serial.println("Button Pressed");
Serial.println("Sweeping servo actuators");
for (pos = 0; pos <= 180; pos += 1)
{
servo_X.write(pos);
delay(10);
}
for (pos = 180; pos >= 0; pos -= 1)
{
servo_X.write(pos);
delay(15);
}
for (pos = 0; pos <= 180; pos += 1)
{
servo_Y.write(pos);
delay(10);
}
for (pos = 180; pos >= 0; pos -= 1)
{
servo_Y.write(pos);
delay(15);
}
Serial.println("Done!!!");
}
if(x > check1 + threshold || x < check1 - threshold)
{
X_angleValue = map(x, 0, 1023, 0, 180);
servo_X.write(X_angleValue);
check1 = x;
Serial.print("X axis voltage level = ");
Serial.println(x);
Serial.print("X axis servo motor angle = ");
Serial.print(X_angleValue);
Serial.println(" degree");
Serial.println("------------------------------------------");
}
if(y > check2 + threshold || y < check2 - threshold)
{
Y_angleValue = map(y, 0, 1023, 0, 180);
servo_Y.write(Y_angleValue);
check2 = y;
Serial.print("Y axis voltage level = ");
Serial.println(y);
Serial.print("Y axis servo motor angle = ");
Serial.print(Y_angleValue);
Serial.println(" degree");
Serial.println("------------------------------------------");
}
}
Setelah Sahabat Indobot selesai Mengetik Program diatas, hubungkan Board arduino dengan Komputer menggunakan USB Arduino kemudian upload program ke Board Arduino. Pastikan proses upload selesai dan berhasil. Jika belum berhasil silahakan periksa kembali rangkaian dan program anda.
Setelah Program Selesai di Upload, putar joystik pada arah tertentu dan lihatlah respon dari Motor Servo.
Sampai disini dulu tutorial Arduino UNO kali ini ya sahabat Indobot. Kalian bisa kembangkan program diatas sesuai keinginan kalian. Tetaplah belajar dan Sampai ketemu di tutorial selanjutnya….
Kamu ingin memperbanyak jam terbang dan portofolio bikin project elektronika/ Arduino/ IoT? Ikuti program dari Indobot!
Ingin Tahu Program Kami Lebih Lanjut?
Silahkan isi Formulir Dibawah Ini untuk Diskusi dengan Tim Indobot Academy.
Warning: Undefined variable $req in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 162
Warning: Undefined variable $commenter in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 163
Warning: Trying to access array offset on value of type null in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 163
Warning: Undefined variable $aria_req in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 163
Warning: Undefined variable $req in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 167
Warning: Undefined variable $commenter in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 168
Warning: Trying to access array offset on value of type null in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 168
Warning: Undefined variable $aria_req in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 169





Warning: Undefined variable $req in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 162
Warning: Undefined variable $commenter in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 163
Warning: Trying to access array offset on value of type null in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 163
Warning: Undefined variable $aria_req in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 163
Warning: Undefined variable $req in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 167
Warning: Undefined variable $commenter in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 168
Warning: Trying to access array offset on value of type null in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 168
Warning: Undefined variable $aria_req in /www/wwwroot/blog.indobot.co.id/wp-content/themes/generatepress/functions.php on line 169